近日,信息科学与工程学院动态系统可靠性控制及安全维护团队张振源副教授在智能车载雷达自主交通环境感知方向取得重要研究进展。相关工作以“RETA: 4D Radar-Based End-to-End Joint Tracking and Activity Estimation for Low-Observable Pedestrian Safety in Cluttered Traffic Scenarios”为题发表在智能交通领域顶级期刊《IEEE Transactions on Intelligent Transportation Systems》(DOI:10.1109/TITS.2023.3321463),该刊是中科院一区TOP期刊,2023年最新影响因子7.9。
该成果针对复杂低信噪比场景中行人目标检测难度大、跟踪精度低、运动行为识别模糊的问题,提出了一种基于端到端架构的行人目标“检测-跟踪-运动识别”一体化系统,不同于传统的分段式目标检测、跟踪思路,该系统创新性地将微弱目标跟踪融入检测过程,解决了强背景杂波干扰条件下目标连续检测中遇到的信息丢失难题;在此基础上,进一步提出了融合连接时序分类算法的循环卷积神经网络框架,可在无需数据预分割的条件下,实现行人运动行为的高效在线特征提取及精准识别。实验表明,所提出的一体化系统通过将行人目标回波信号采集、雷达信号处理、运动特征提取及行为状态识别整合入统一的端到端架构,实现了行人目标运动在复杂背景噪声干扰下的实时在线精确检测与高精度识别,为智能驾驶的道路环境自主感知提供了一种新的解决方案。
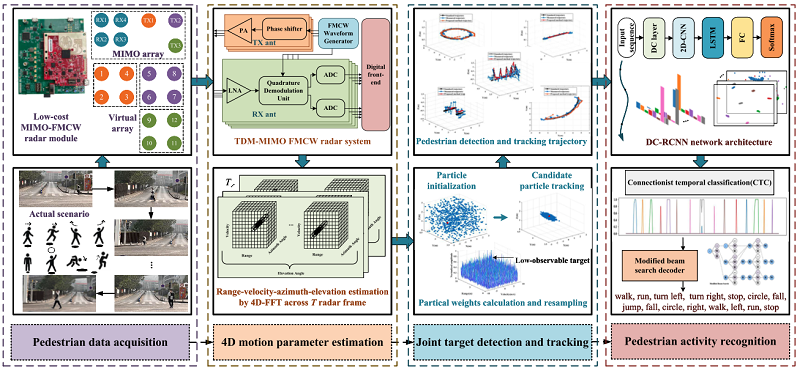
本研究提出的基于端到端架构的行人“检测-跟踪-动作识别”一体化系统
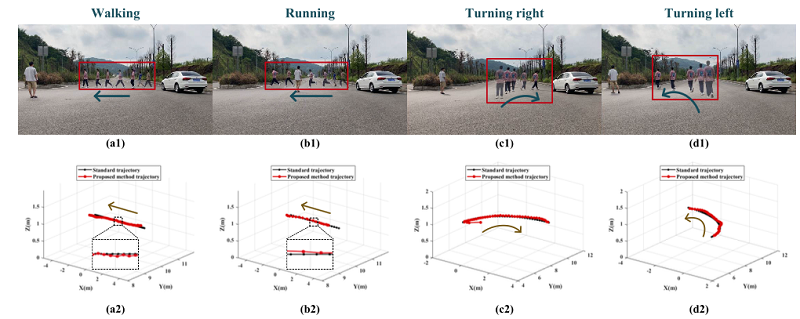
实际交通场景下的行人目标运动检测-跟踪结果

实际交通场景下的行人目标运动行为识别结果
该研究成果与安徽大学、西南石油大学、重庆邮电大学及美国佐治亚理工学院(Georgia Institute of Technology)合作完成,期间得到安徽大学黄大荣教授、重庆邮电大学周牧教授、佐治亚理工学院Ying Zhang教授及西南石油大学方鑫副教授的悉心指导和大力支持。